单点最短路算法题解
单点最短路算法 题解
知识点:图论 | Dijkstra | 贪心 | 优先队列(堆优化)
此文章的MarkDown、源码以及原图:点击跳转Gitee仓库
📗 题目描述
输入: 三个整数 $n, m, k$,分别表示 $n$ 个顶点、$m$ 条有向边,起点为 $k$。接下来 $m$ 行,每行三个整数 $u, v, w$,表示从 $u$ 到 $v$ 的有向边,边权为 $w$。
输出: $n$ 行,分别表示起点 $k$ 到各顶点的最短距离。若某点不可达,输出 INF。
无限大常量定义:
1 |
为什么用
0x3f3f3f3f而非0x7fffffff?
INF + INF = 0x7e7e7e7e < 0x7fffffff,不会溢出导致负数- 满足无穷大加法不溢出的要求,同时足够大(约 $10^9$)
📘 算法思想
Dijkstra 算法概述
Dijkstra 是一种贪心算法,用于在非负权图中求单源最短路。核心策略:
每次从尚未确定最短路径的节点中,选出距离起点最近的节点,将其标记为”已确定”,然后用它更新邻居的距离。
算法三步循环:
- 从堆中取出当前距离最小的未确定节点 $u$
- 将 $u$ 标记为已确定(加入集合 $S$)
- 用 $u$ 的出边松弛所有邻居 $v$:若 $\text{dist}[v] > \text{dist}[u] + w(u,v)$,则更新
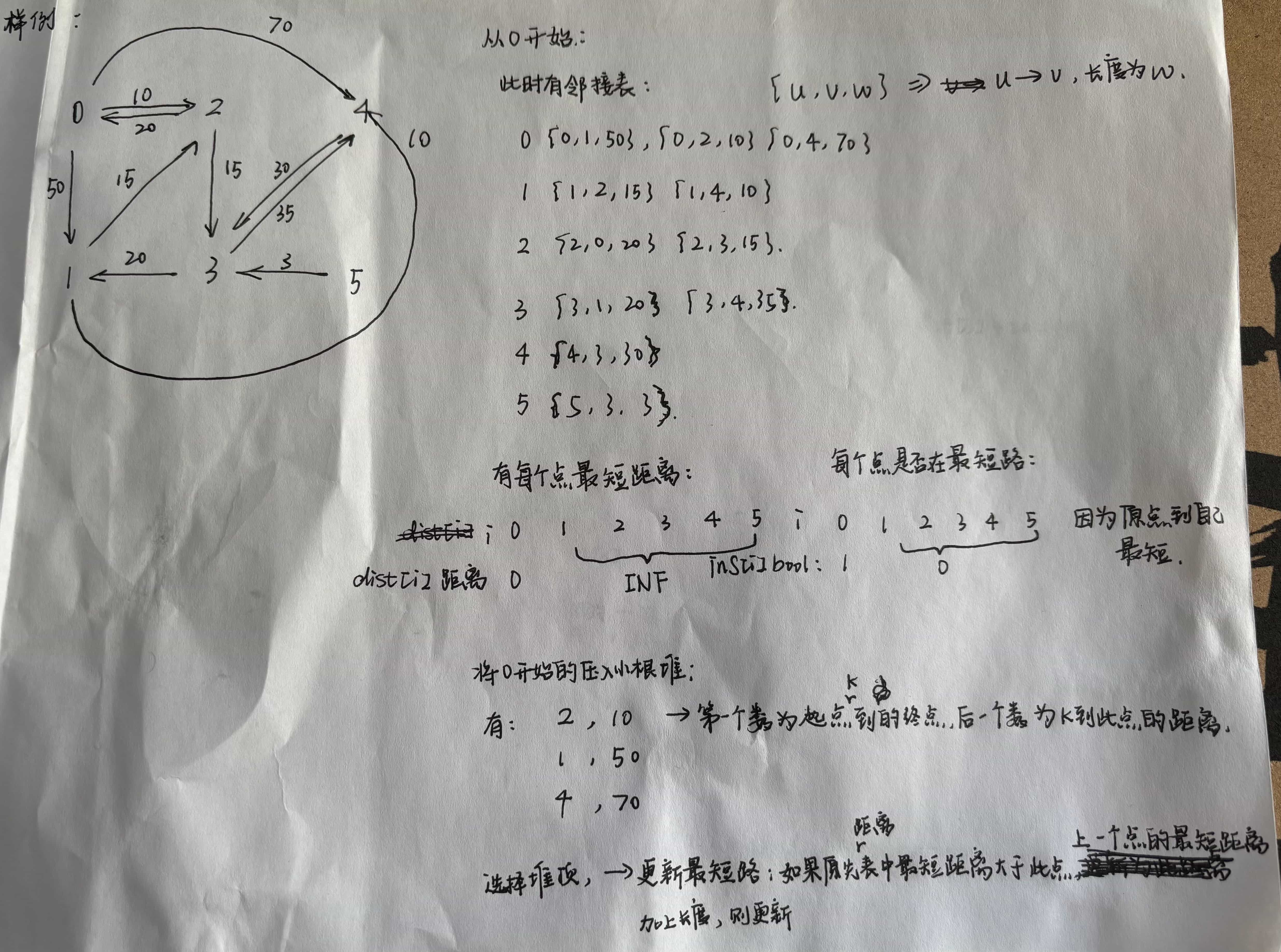
算法手记
📙 数据结构
邻接表元素
1 | struct Edge { |
小根堆元素
1 | struct Node { |
C++ 的
priority_queue默认是大根堆。将<重载为>后,堆顶元素就是距离最小的。
容器总览
| 容器 | 类型 | 作用 |
|---|---|---|
cur |
vector<vector<Edge>> |
邻接表存图 |
dist |
vector<int> |
起点到各点的最短距离,初始 INF |
inS |
vector<bool> |
标记节点是否已确定最短路 |
pq |
priority_queue<Node> |
小根堆,每次弹出距离最小的节点 |
1 | vector<vector<Edge>> cur(n); // 邻接表 |
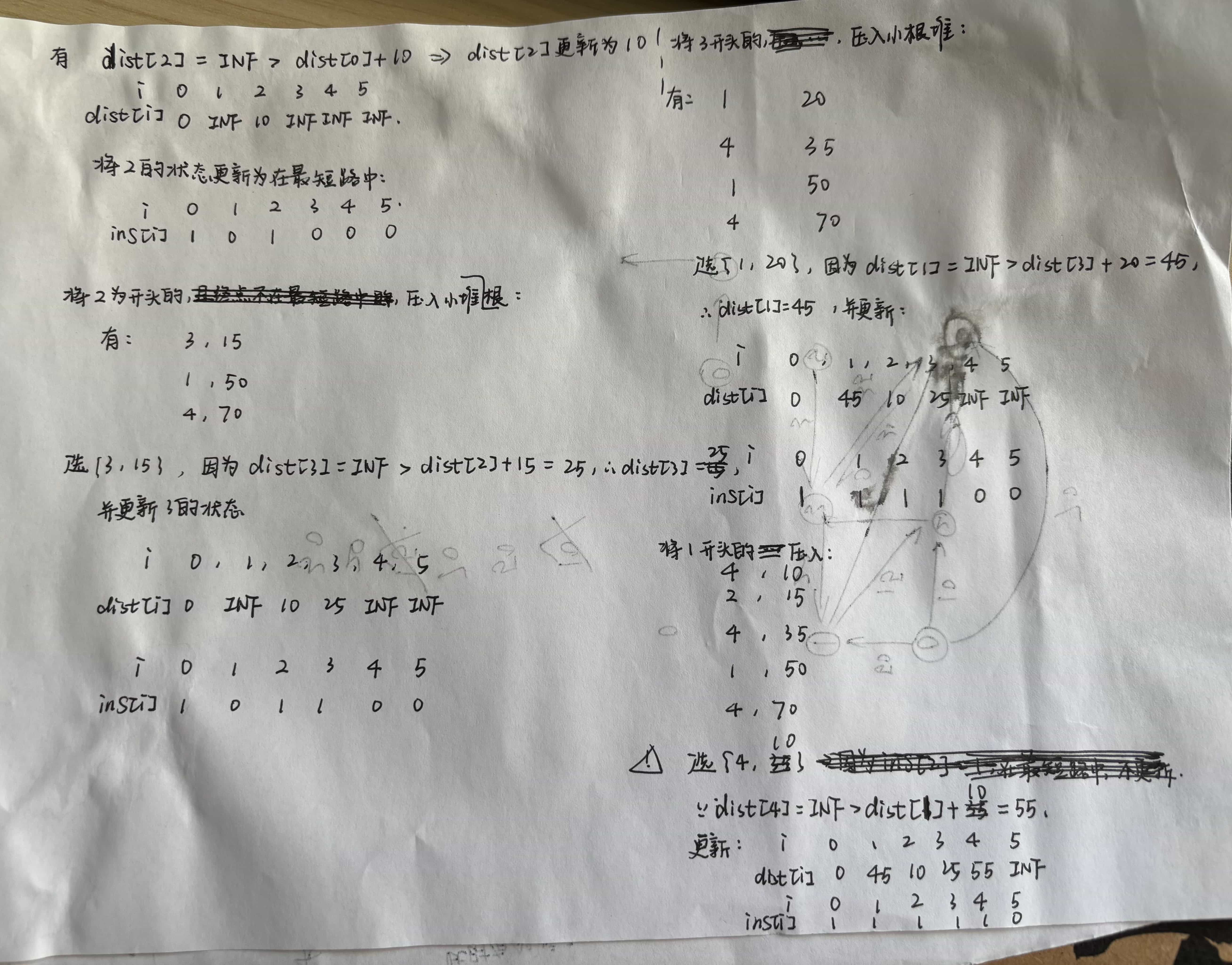
📕 算法流程详解
| 步骤 | 操作 | 说明 |
|---|---|---|
| 1 | dist[k] = 0 |
起点距离设为 0 |
| 2 | pq.push({k, 0}) |
将起点入堆 |
| 3 | pq.top() 取出最小节点 $u$ |
每次选当前最近的未确定节点 |
| 4 | if (inS[u]) continue |
已确定则跳过(堆中可能有重复) |
| 5 | inS[u] = 1 |
标记为已确定 |
| 6 | 遍历 $u$ 的所有出边,尝试松弛 | dist[v] = min(dist[v], dist[u] + w) |
| 7 | 若松弛成功,pq.push({v, dist[v]}) |
将更新后的邻居入堆 |
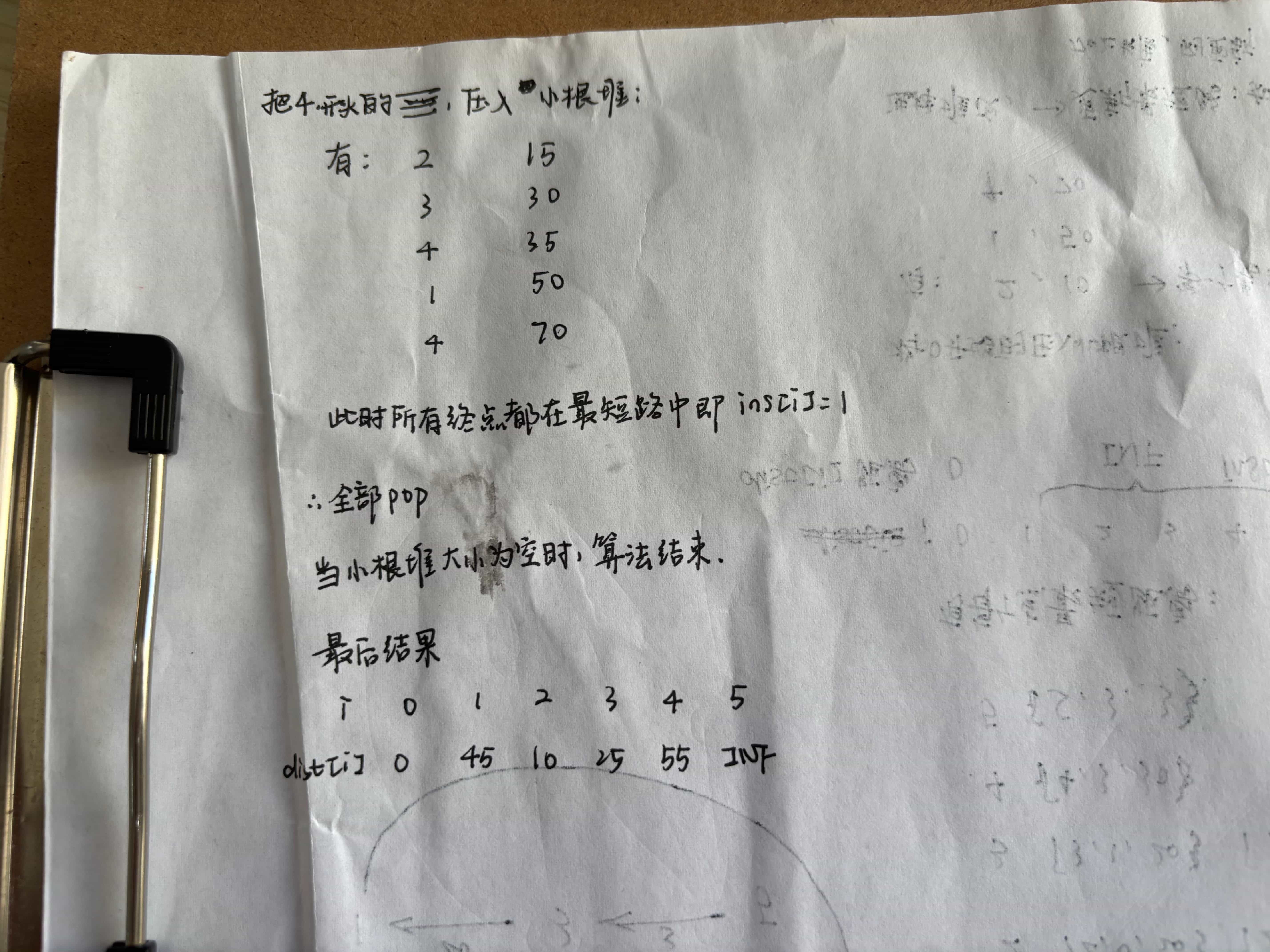
| 8 | 重复 3~7 直到堆空 | 所有可达节点均已确定 |
松弛操作核心:
1 | if (dist[v] > dist[u] + w) { |
📓 完整代码
1 | // |
📝 算法要点总结
Dijkstra vs 其他最短路算法
| 算法 | 适用条件 | 时间复杂度 | 备注 |
|---|---|---|---|
| Dijkstra(堆优化) | 非负权图 | $O((n+m) \log n)$ | 本题使用 |
| Dijkstra(朴素) | 非负权图 | $O(n^2)$ | 稠密图可用 |
| Bellman-Ford | 允许负权边 | $O(nm)$ | 可检测负环 |
| SPFA | 允许负权边 | 均摊 $O(m)$ | 最坏 $O(nm)$ |
| Floyd | 全源最短路 | $O(n^3)$ | 求任意两点间最短路 |
复杂度分析(堆优化)
| 指标 | 复杂度 | 说明 |
|---|---|---|
| 时间 | $O((n+m) \log n)$ | 每个节点最多入堆一次(实际可能多次),每次堆操作 $O(\log n)$ |
| 空间 | $O(n+m)$ | 邻接表 + 距离数组 + 堆 |
为什么 Dijkstra 不能处理负权边?
Dijkstra 的贪心策略要求:一旦节点 $u$ 被标记为”已确定”,
dist[u]就是最终最短路径。但若存在负权边,后续可能通过负权边找到更短的路径到 $u$,违反这一前提。
💡 易错提醒:
priority_queue默认大根堆,operator<要重载为>才能得到小根堆- 堆中可能存在同一节点的多条记录(不同距离),取出的已确定节点要
continue跳过- 本题为有向图,只存单向边;若为无向图需存双向
- 节点 5 无入边且不是起点,因此
dist[5] = INF(不可达)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Yui's Blog!